Hexapod
When I started out with Arduino I stumbled on the letsmakerobots.com website. I found lots of robot projects on LMR, it’s amazing what people can make at home today. One particular kind of robots sparkled my interest, hexapods. Controlling and powering lots of servos looked quite difficult to me so I first started with my Rover 5 and later with a little line following robot. Now that I have a bit more experience building robots it was time to built my own hexapod, the Bajdupod 9G.
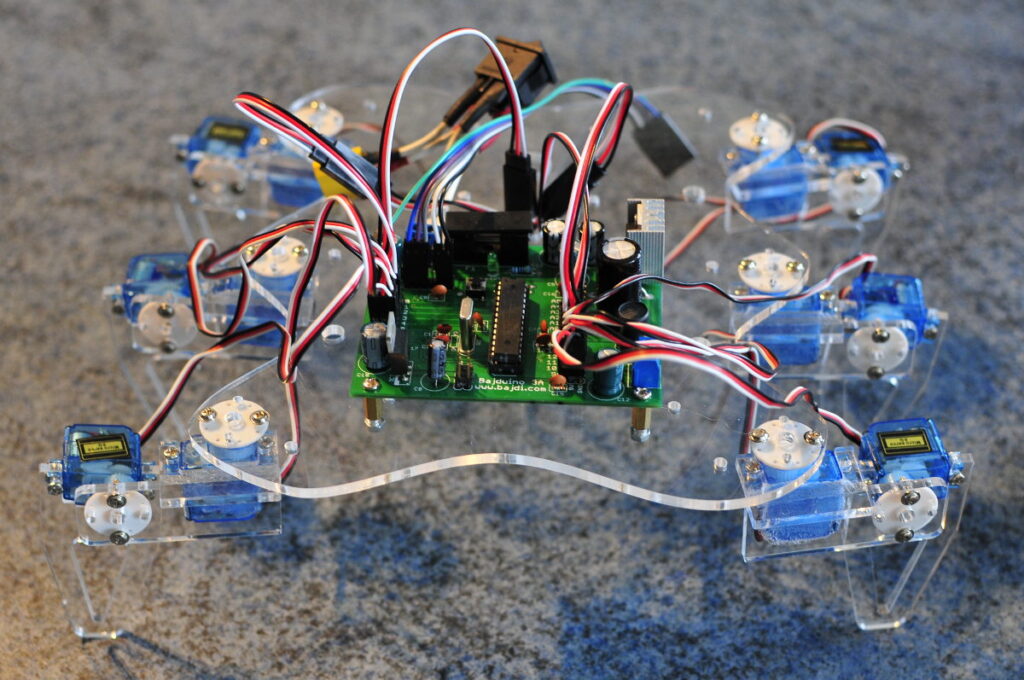
An ATmega328P-PU with the Arduino servo library can control a maximum of 12 servos. I wanted to keep things simple for my first hexapod and chose to use 2 DOF legs. So I can use an ATmega328 to control the 12 servos. I designed the base and legs in Autocad and had the parts laser cut in acrylic by a local company. I then bolted and glued the different parts and servos together. This didn’t go according to my plan. I had bought a dozen micro 9G servos on Ebay and first used these. But I had a lot of trouble connecting them to the servo horns. These small servos come with tiny screws to bolt the servo horn to the servo. The little screws kept breaking. Leaving me with unusable servos because a small piece of the screw was stuck in the servo. I then tried to glue the servo horns to the servos but the legs kept falling of. I nearly gave up until I remembered I had some other small servos, SG90 servos. They are about the same size then the 9G servos. So I replaced the 6 hip servos with SG90’s, these come with better screws. After hours of swearing I finally had a hexapod that didn’t fell apart.
To control the servos I use my Bajduino 3A board. I has an ATmega328P-PU with Arduino bootloader and a 3A 5V switch-mode voltage regulator.
After connecting all the servos to the Bajduino 3A I tested all the servos and put all the center, minimum and maximum values in a spreadsheet. Then I wrote a sketch to let the hexapod walk forward. After some minor tweaking I now have a hexapod that can walk forward 🙂
Hello Bajdi,
(I don’t believe I saw your name any where, if it’s Bajdi, then cool)
I am building an autonomous hexapod for the first time, in fact I just started to learn to program about two months ago. I’m using Arduino and have a prototype for one leg. But this is where I’m stuck. I can’t seem to get both servos (10- 12 eventually) to operate at the same time. I’m trying to save strings into PROGMEM and then retrieve them via Serial(), then write them to the servos. Each part of the code works separately but not togther. I get strings from PROGMEM to print on the monitor and if I manually input strings into the monitor, they will write to servos. Would you have any advice or suggestions as how to accomplish this?
Thanx
I have never used progmem… So I don’t think I can help you. Post your code on the Arduino forums, lots of friendly people there that can help you.
Hello there Bajdi,
nice project you’ve got there.
I also want to build a hexapod just like yours, but I’m stuck at one thing.
I don’t know what parts I should use for the body.
Mind if I ask you where you bought your acrylic parts for the hexapod?
Thanks in advance.
I designed them myself in Autocad and had them laser cut by a local company.
Hey man
i was wondering if i could take a look at your IDE code for this cool project for yours? i myself am starting out with robotics, and thought your code could help me with the code
thanks
Have a look at the code I posted of my Bob robot, it’s very similar: http://www.bajdi.com/bob-the-biped/