I have spent a lot of time on my little hexapod the last couple of days. I have finished writing the code for the basic walking gaits, forward/backward/left and right. This is the walking gait I have come up with:
FORWARD walking gait
knee up 1,3,5 knee down 2,4,6
hip forward 1,3,5 hip backward 2,4,6
knee down 1,3,5 knee up 2,4,6
hip backward 1,3,5 hip forward 2,4,6
BACKWARD walking gait
knee up 1,3,5 knee down 2,4,6
hip backward 1,3,5 hip forward 2,4,6
knee down 1,3,5 knee up 2,4,6
hip forward 1,3,5 hip backward 2,4,6
LEFT walking gait
knee up 1,3,5 knee down 2,4,6
hip backward 1,3,4,6 hip forward 2,5
knee down 1,3,5 knee up 2,4,6
hip forward 1,3,4,6 hip backward 2,5
RIGHT walking gait
knee up 1,3,5 knee down 2,4,6
hip forward 1,3,4,6 hip backward 2,5
knee down 1,3,5 knee up 2,4,6
hip forward 2,5 hip backward 1,3,4,6
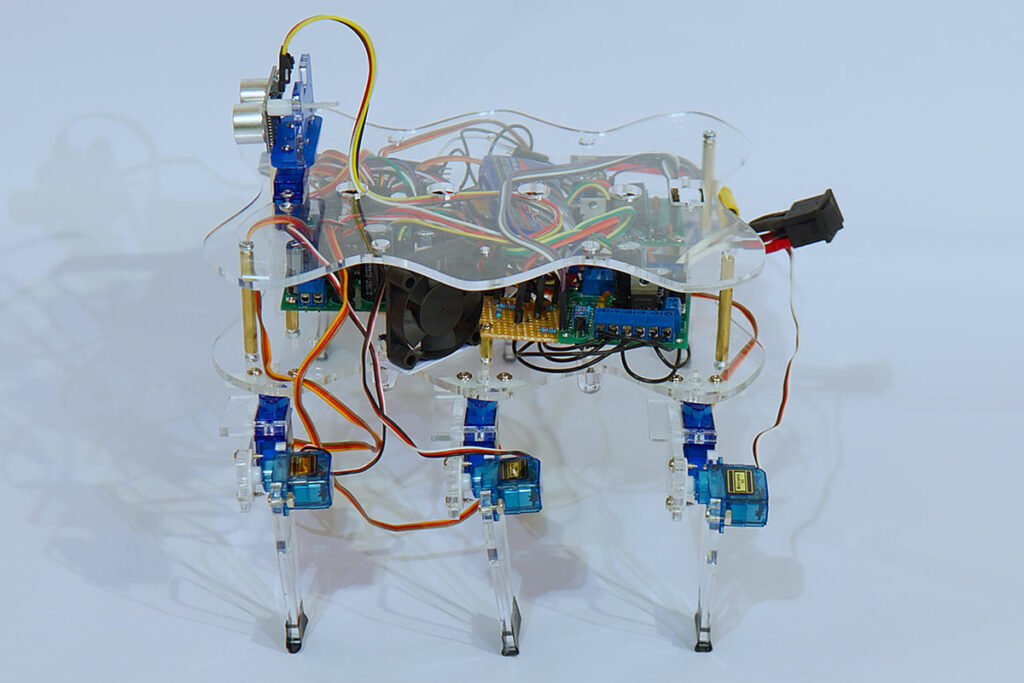
Then I decided to try and remote control Bajdupod, I already have a remote control based on an Arduino Uno with joystick shield and nRF24L01 module which I have used with my Rover 5. So I needed to fit an nRF24L01 module to my hexapod. The 12 servos are connected to my Bajduino 3A which is based on the ATmega328P-PU, so 12 servos use 12 pins. I have used 1 analog pin to monitor the battery voltage. That doesn’t leave many pins free. I solved this by adding another of my PCB creations, the Bajduino 328RF24. The Bajduino 328RF24 is a small (5x5cm) board that has an ATmega328P-PU and a header for the nRF24L01 module. With the plan to let both micro controllers talk to each other over the I2C bus. There is one catch though, the Bajduino 328RF24 runs at 3.3V. To connect both micro controllers I used my logic level converter to convert the I2C signals to the right voltage. I didn’t have much trouble in writing the code for the nRF24L01 modules as I have used them before. But I spent quite a lot of time getting the I2C communication to work. As you can see in the video my code is still far from perfect.
While making the video I damaged another servo. I have had a bit of bad luck with my servos, I’ve destroyed quite a few the last week… This made me realise that these little micro 9G servos are not suited for my hexapod. The base is quite wide so there is a lot of strain on them. I’ve ordered some Towerpro MG90 servos, these have metal gears and should be a bit stronger. Hopefully my Bajduino 3A with LM2576 3A 5V regulator will be strong enough to power those servos. During the many test sessions I burnt my finger at the small heatsink I put on the regulator. To prevent it from melting or blowing up I added an old 60mm pc fan on top of it. It’s amazing what a little bit of air can do, the regulator gets barely hot now.
My next plans with Bajdupod 9G are to get my code in order. Replace all the servos with some stronger ones. Then I will add some sensors an try and write a autonomous sketch for it. I also have some 10mm RGB leds that I will glue to the chassis, it must have some eye candy 🙂
Hexapod
Hexapod
Hexapod