DFrobot insectbot
DFrobot sent me their latest robot kit, the insectbot kit. It’s a small 2 servo robot that’s easy to built and program. The kit is ideal for people who want to built their first robot. It comes with an Arduino compatible micro controller. The insectbot kit is sold for less then 30$, so it doesn’t require a big investment. And to my surprise that even includes the small Lipo battery and charger.
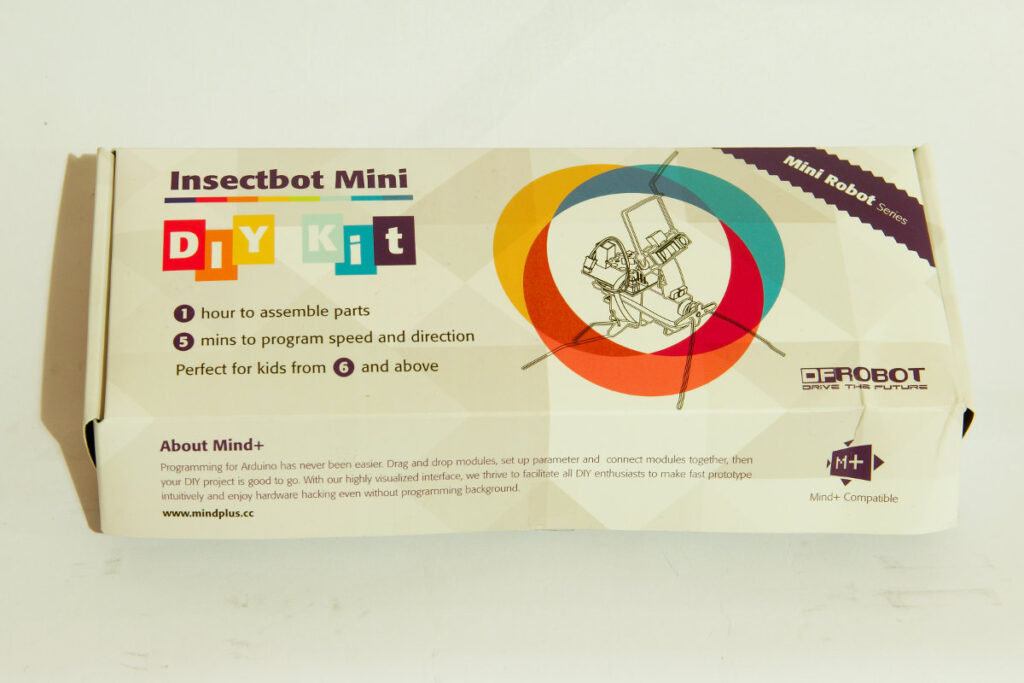
The package arrived from China in a rather big box:

DFrobot insectbot
Inside the big box I found a small box containing all the parts to built the insectbot 🙂
DFrobot insectbot
These are the parts of the insectbot:

DFrobot insectbot
- 1x Beetle (Arduino compatible)
- 1x Beetle Shield 2x 9g Micro Servo
- 1x Sharp IR Sensor
- 1x LiPo Battery 3.7V/ 180mAh + Charger
- 2x Steel Wire 200mm x 1 mm
- 1x ABS Sheet (50x50mm)
- 1x Double Sided Foam Tape(L/W/H:40x30x3mm)
- 5x Cable Tie 1.8x100mm
- 1x Cable Tie 4x200mm
The kit does not include a manual or built instructions. But the creator of the robot kit has put built instructions on Instructables and there is a nice youtube video showing the building of an insectbot, watch it here. Making the kit does not take long, you can easily built it in less then an hour. To built the kit I used the following tools:
- Scissors
- Pliers
- Cutting knife
- Solder iron
- Small screwdriver
Building the kit:
The chassis of the insectbot is made out of the bodies of the 2 servos and the Lipo battery. The parts are held together with double sided tape. Use a pair of scissors to cut up the double sided tape.

DFrobot insectbot
Then you need to join the 2 servos together using a piece of double sided tape and a zip tie:
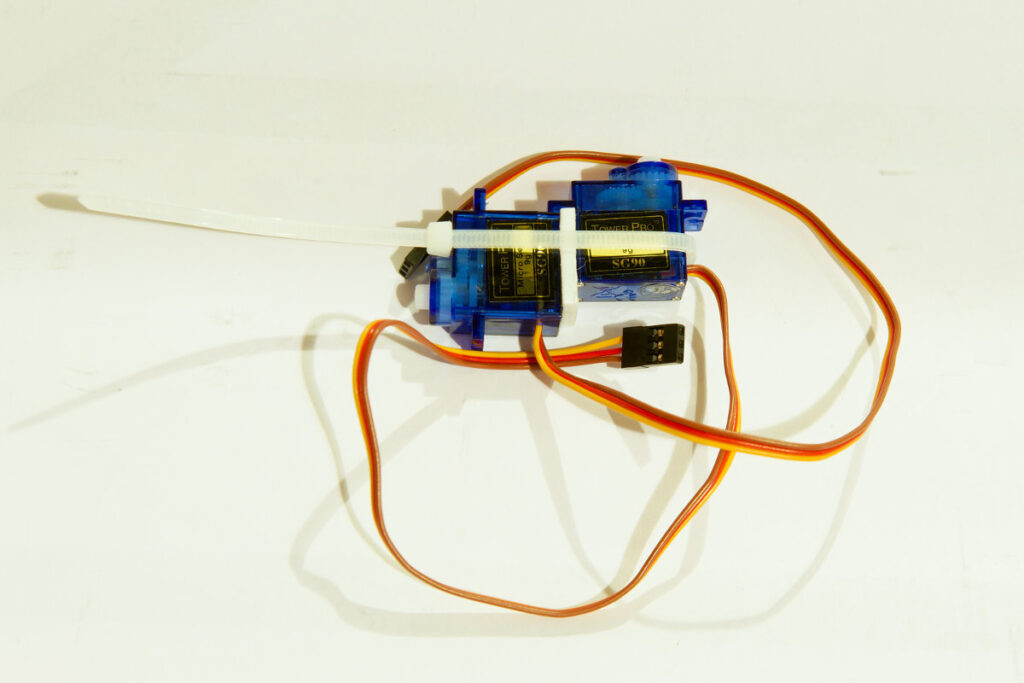
DFrobot insectbot
Now comes the hard part… Making the legs. You need to bent the steel wires so they can be used as legs. You need to bent them so they fit the servos. I bent them around a pen:
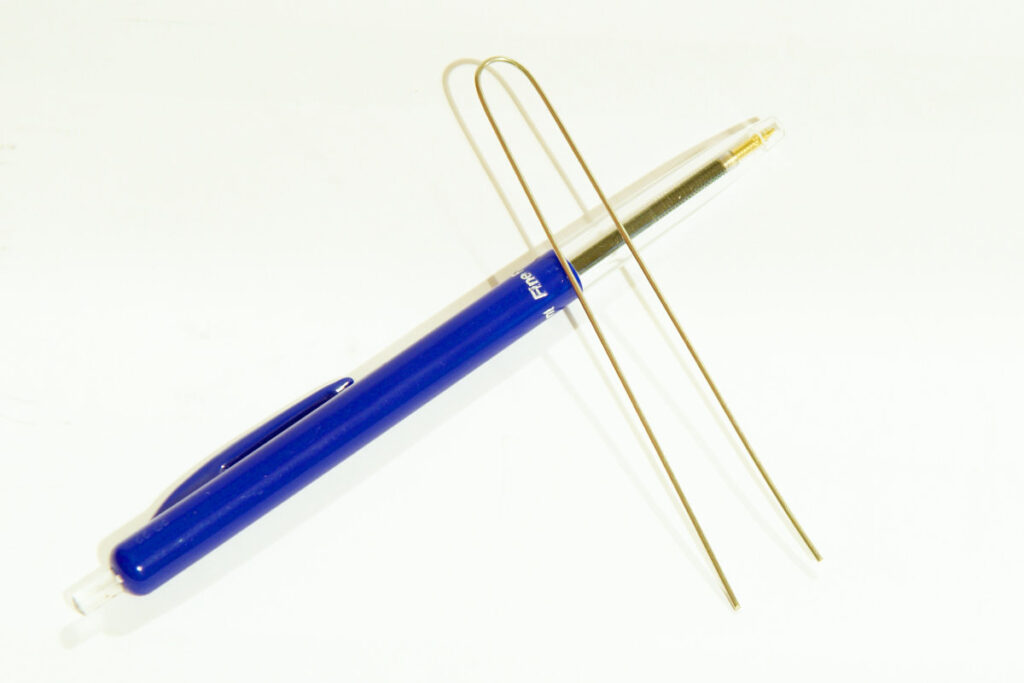
DFrobot insectbot
You then need to use pliers to bent a lip so they fit the servos. The wires go through the servos horn. Here is the result:
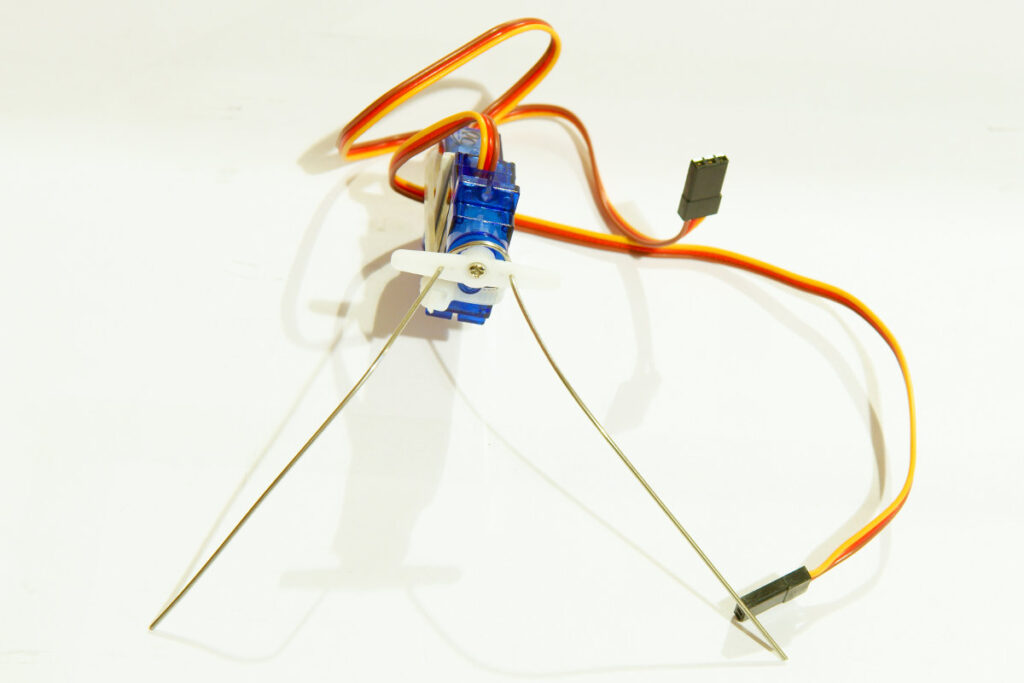
DFrobot insectbot
You need to do that for both wires. The end result does not matter much at this point. When the robot is finished you will probably adjust them further to optimize the walking gait.
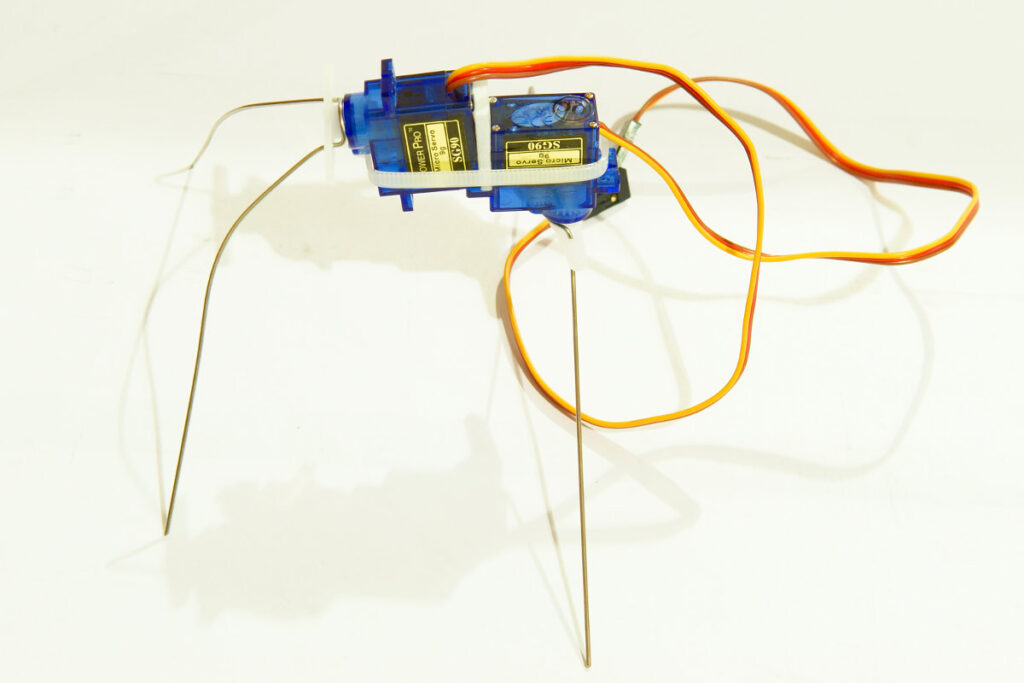
DFrobot insectbot
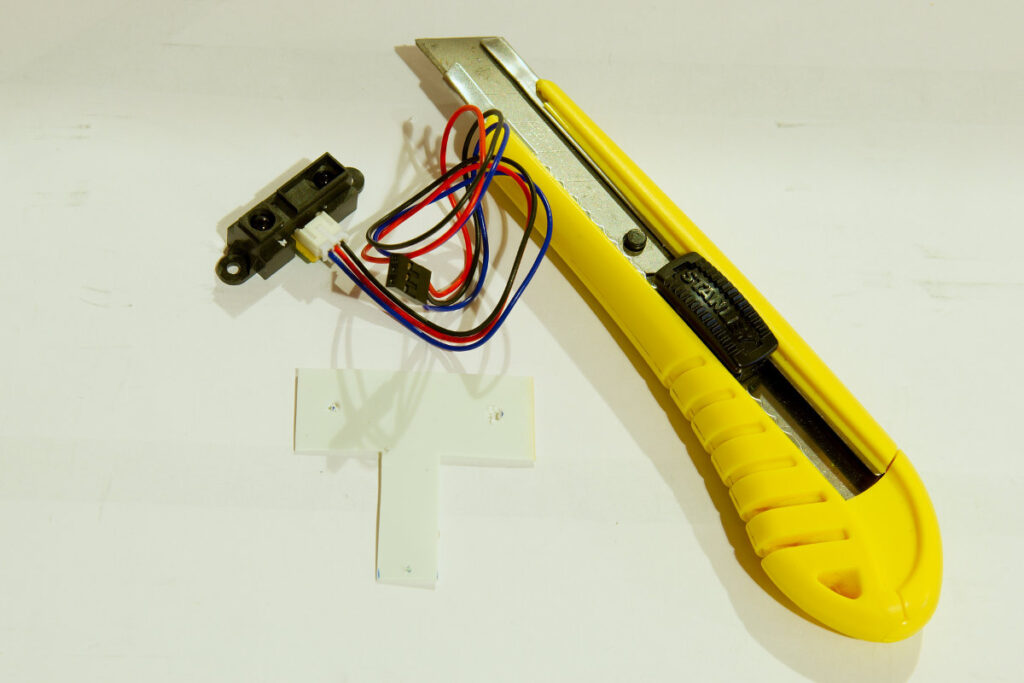
Next step is fitting the Sharp IR sensor to the small piece of ABS sheet. Using a pair of scissors you need to cut it so the bottom is the same width of the servo and the top is big enough for the IR sensor.
DFrobot insectbot
You have to fit the botton of the ABS sheet to the front servo using the screws supplied with the servo. I first made a hole in the ABS to easily attach it with the screw. The IR sensor is attached by making 2 holes in the ABS sheet and using 2 zip ties. I used the tip of a cutting knife to make the small hole to attach it to the servo and 2 bigger holes to fit the IR sensor.
DFrobot insectbot
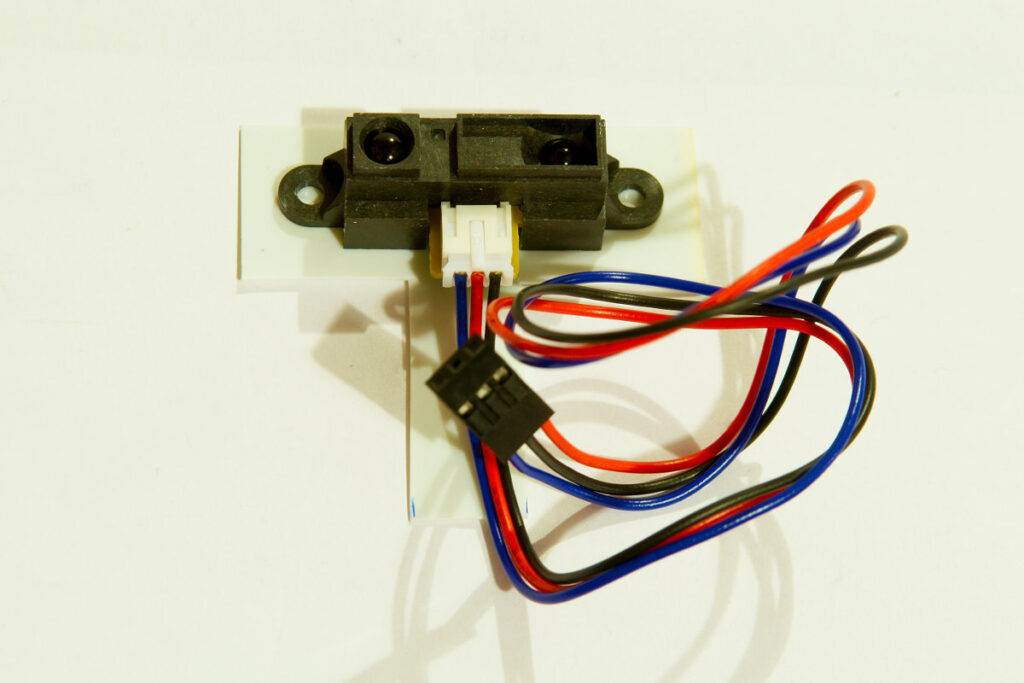
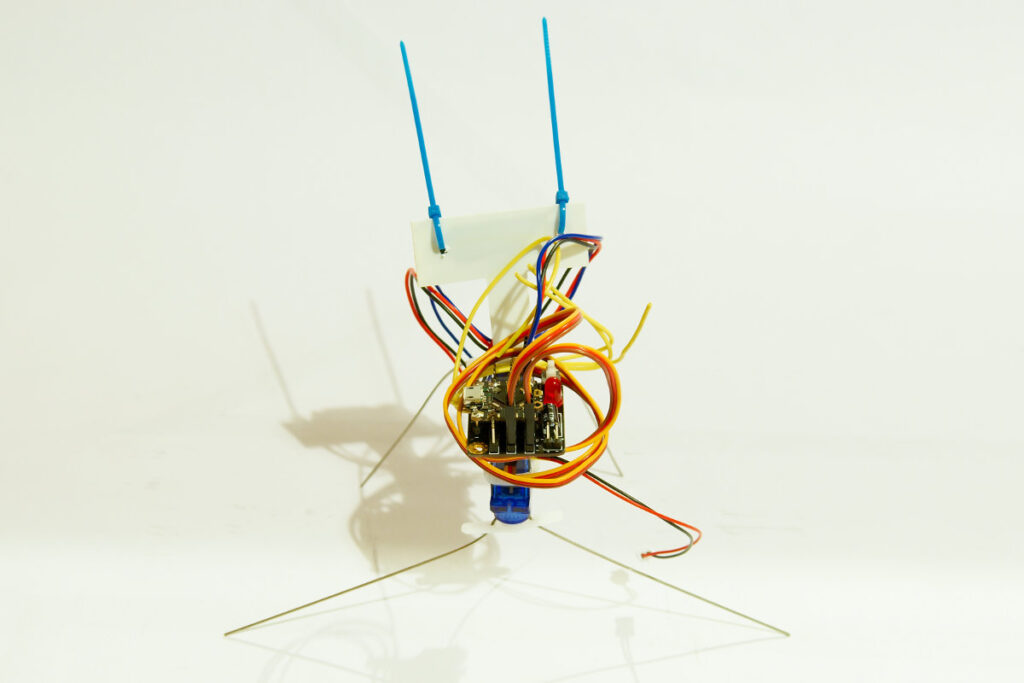
Then you need to zip tie the IR sensor to the ABS sheet and screw the assembly to the front servo. You should then have something like this:
DFrobot insectbot
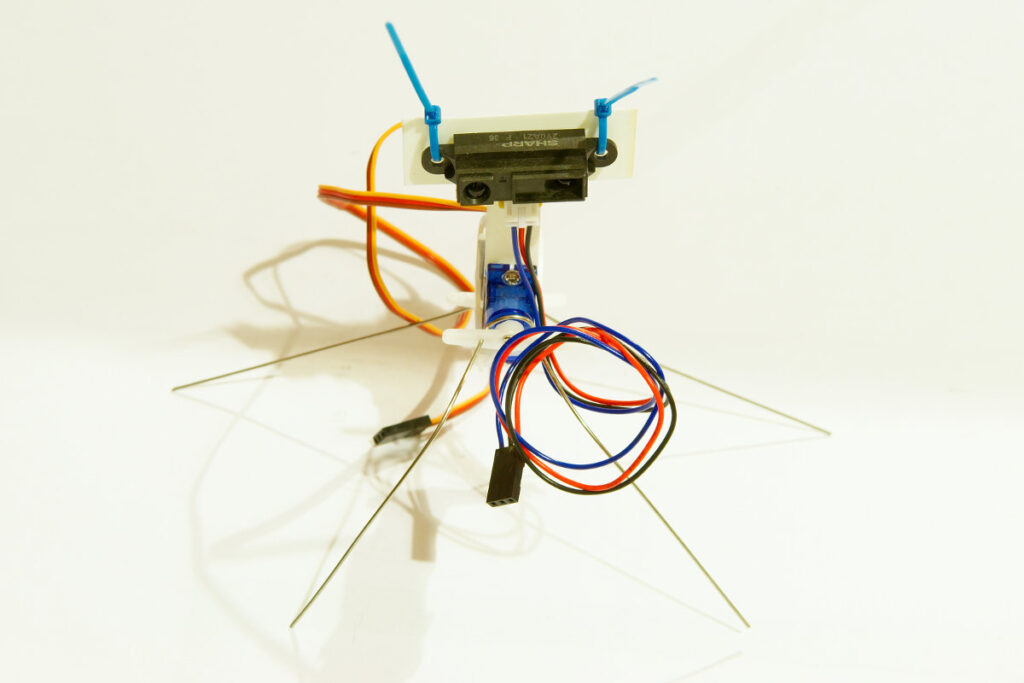
DFrobot insectbot
Then it’s time for some soldering. The Beetle has to be soldered to the Beetle shield. The Beetle also has some pads on the bottom of the board. If you want to use them you must solder some wires to these pads. Once the Beetle is soldered to the shield they are not accessible any more. So I first soldered some wires to the bottom pads of the beetle. This is quite easy since the pads are pretty big.
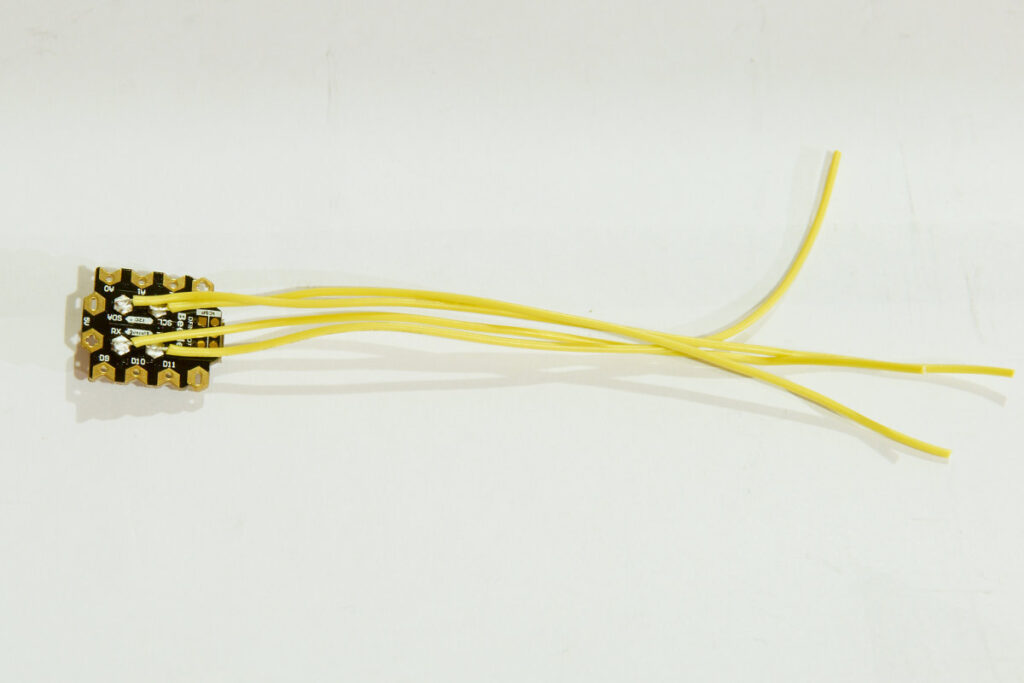
DFrobot insectbot
Then you need to solder the Beetle to the shield:
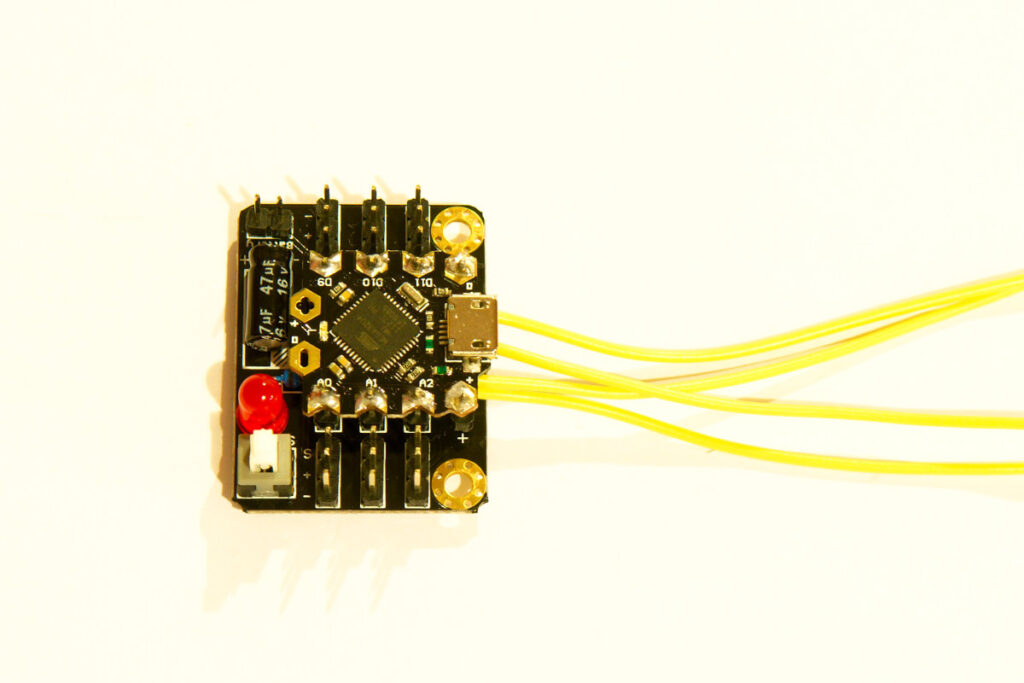
DFrobot insectbot
The beetle shield fits on top of the Lipo battery. You join them by using a piece of double sided tape. The battery and beetle shield then fit on the back servo. Like this:
DFrobot insectbot
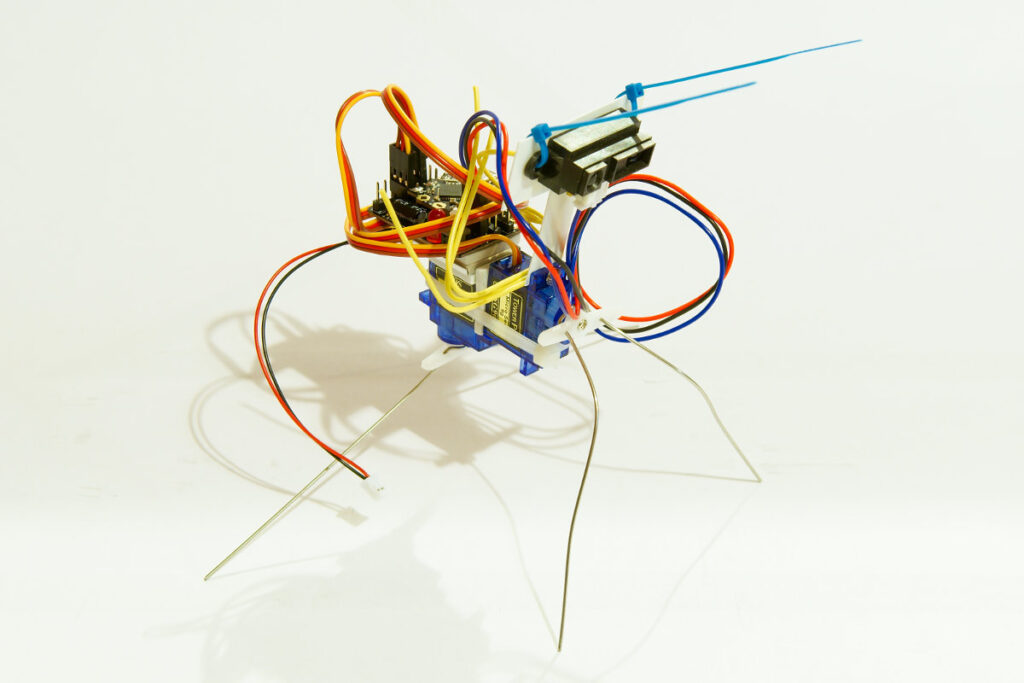
DFrobot insectbot
The beetle shield makes it very easy to connect the servos and IR sensor. You can just plug them on the shield. I used pin D9 and D10 for the servos and A0 for the IR sensor. The Sharp IR sensor does not need any special code, it is just an analog sensor. The servos can be controlled by the Arduino servo library that comes with the Arduino IDE.
The Beetle board or shield don’t have a voltage regulator so you can’t use a battery that gives more then 5V. Luckily the insectbot kit comes with a small single cell Lipo battery. It also comes with a small Lipo charger. The Beetle shield has 2 male pins to connect a battery. Unfortunately the plug of the battery doesn’t fit the pins very well. I bent the pins a bit to make them fit better.
Programming the Beetle is not difficult. It uses the same micro controller as the Arduino Leonardo, the ATmega32U4. The beetle has a micro USB plug to connect it to your computer. You can download the Insectbot code on the DFrobot website. Just open the sketch in the Arduino IDE, select Arduino Leonardo as board and click upload.
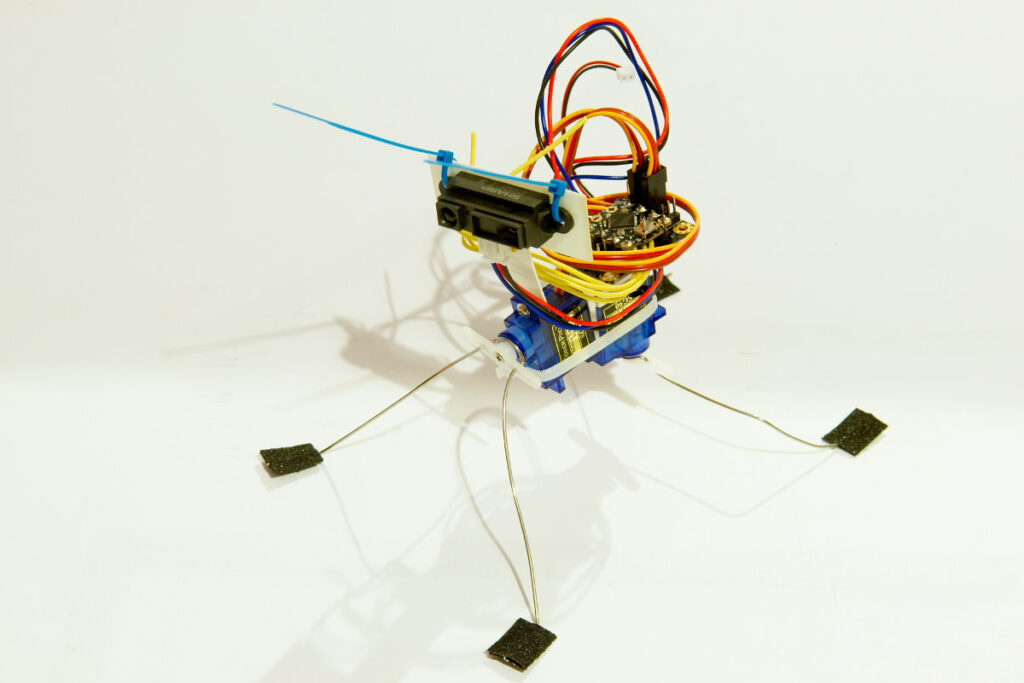
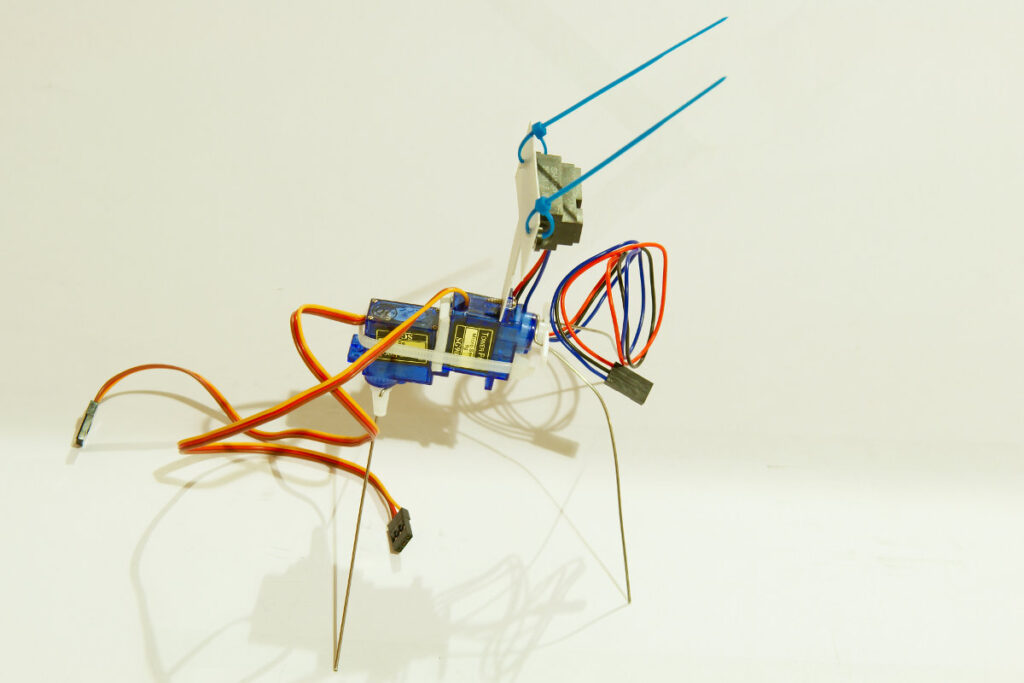
Making the insectbot walk with the above code is not that easy as expected from a 2 servo walker. So I started fine tuning my little insectbot. I bent the legs so the robot has a lower point of gravity. I also fitted some antislip tape to the legs. I’ll be honest it still doesn’t walk very fast, it’s more a wiggling robot then a walking robot. But that is the nature of the design.
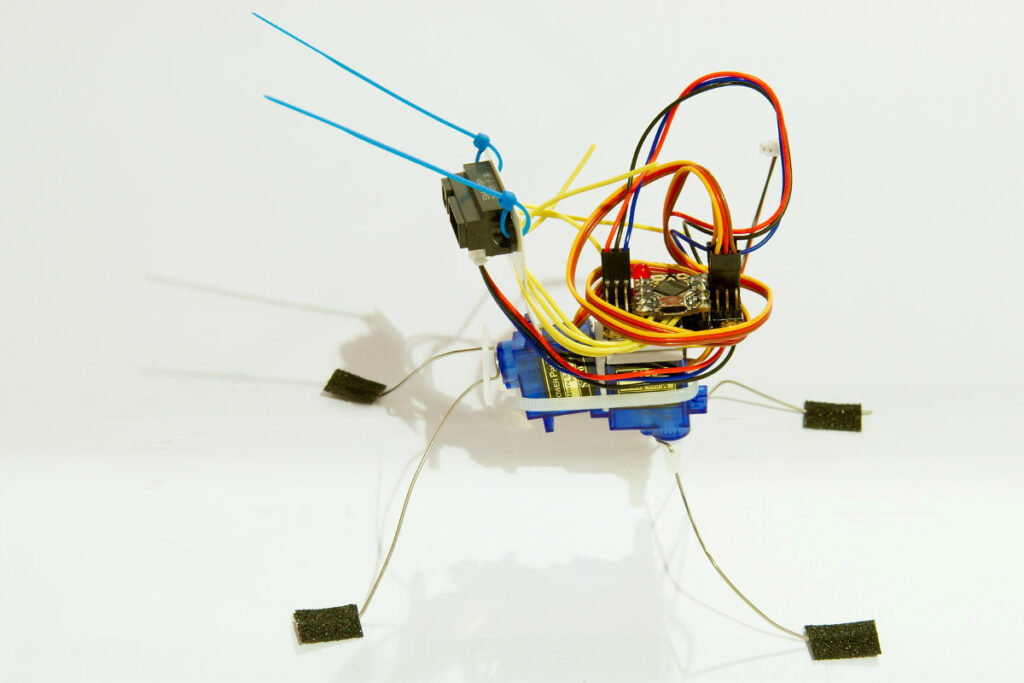
DFrobot insectbot
Great review Bajdi. The insect bot seems to be a good choice for the first steps into the robot builder world 🙂 Thank you for that review.