Dagu service droid
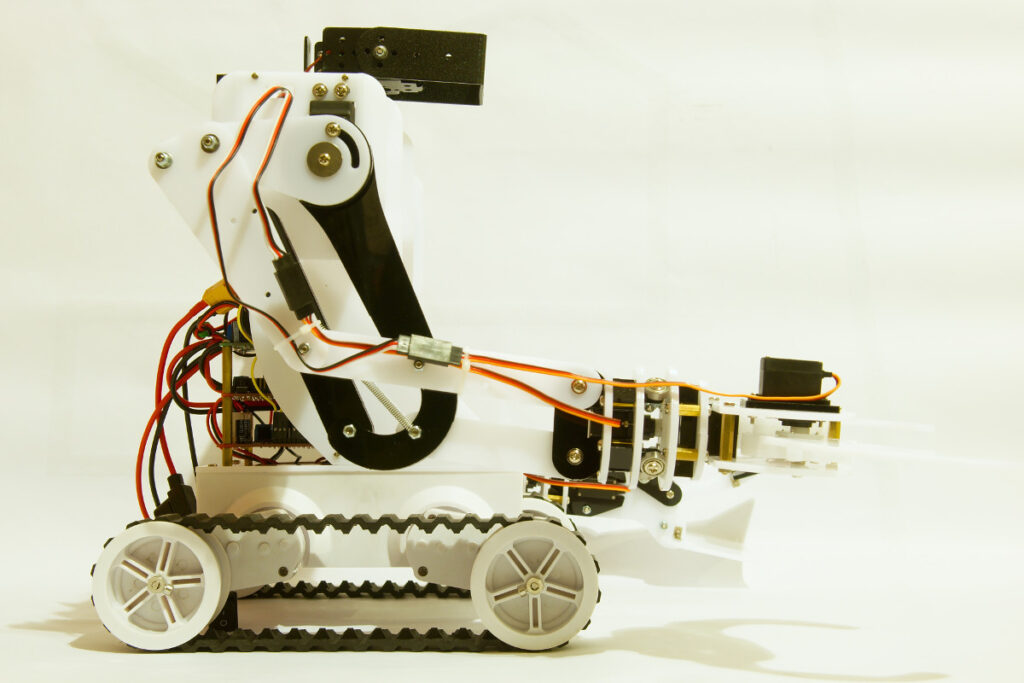
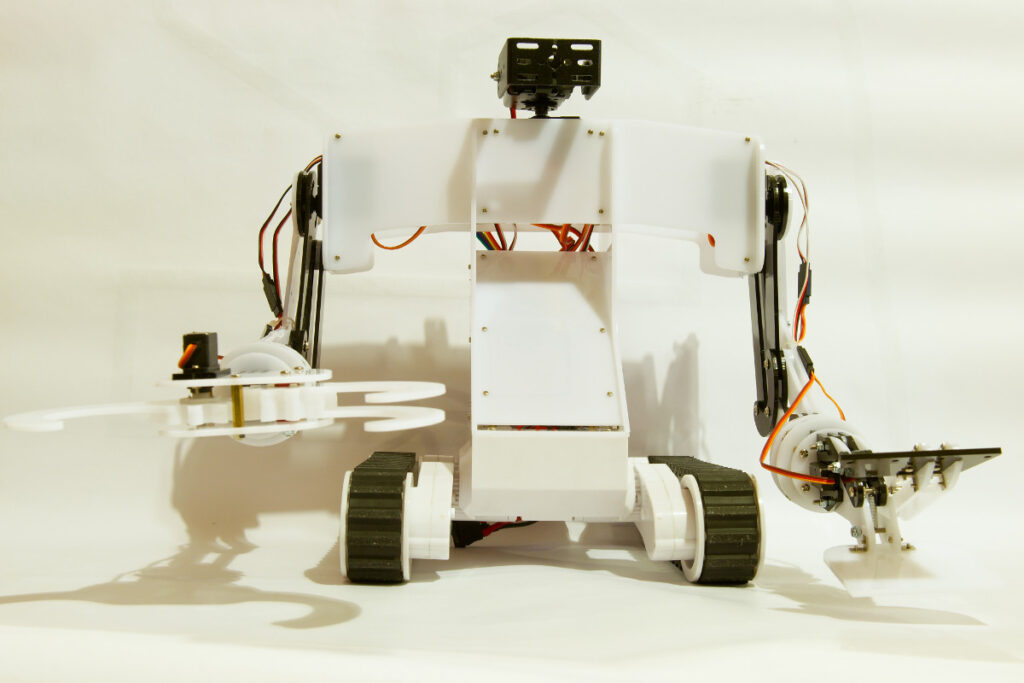
When I saw the offer on letsmakerobots.com to buy a new robot kit from Dagu at a special price I didn’t hesitate… Dagu’s new robot kit is the “service droid”. It’s a kit that can be mounted on the popular Rover 5 platform. The service droid is made from hundreds of laser cut acrylic parts. All the parts are bolted together. You can download the manual here. It took me around 10 hours to put all the parts together and setup the servos. The kit has 2 robotic arms, each arm has 3 servos. On top of the torso there is pan/tilt kit using another 2 servos. This is a big kit containing lots of small parts, screws, … it’s not some toy that you can quickly put together. Since I got an early version I was quite surprised that all the parts fitted. It took me so long to put together because of the many parts and I had to redo some things that weren’t explained very well in the manual. The manual has since been updated making it easier to built.
Dagu service droid
When I ordered the Service droid I also ordered a new Rover 5 chassis. So I now have 2 Rover 5’s. I’ve actually moved all the parts from my old Rover 5 to the new chassis. The new version of the Rover has a new style of wheels and different encoders. I wanted to try the encoders with my mecanum wheels. So I used the new wheels and tracks on my old chassis. And used that as the platform for my service droid.
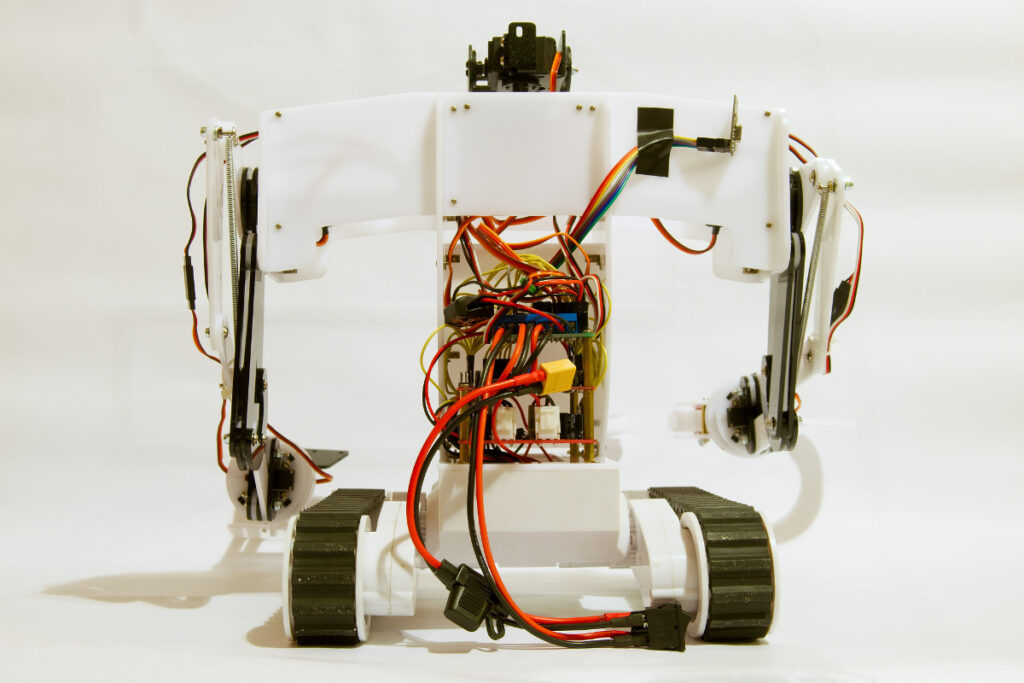
All the servos are included in the service droid kit, but it does not come with a micro controller or other electronics. So you are free to use your favourite micro controller. I chose the Dagu red back spider robot controller, it’s based on the ATmega2560 micro controller and has an Arduino bootloader. That gives me a massive amount of I/O to connect lots of sensors. I also bought the Dagu 4 channel motor controller to power the motors.
Dagu service droid
I’m using a 2S Lipo battery to power the motors and servos. To distribute the power to the motor controller, red back spider and UBEC (powers the servos) I designed a small PCB. This PCB has a voltage divider to monitor the battery voltage. There are 2 voltage regulators, a 5V (LM2940) voltage regulator for the logic of the motor controller and a small LP2950-3.3 regulator for 3.3V devices. The PCB also has a couple of leds which are handy for debugging and I also added a couple of transistors which may be useful in the future. Most importantly the board has a bunch of male pins that allow me to power the 8 servos of the service droid. 2 servos are powered straight from the Lipo battery. These are the servos that move the arms up and down. The other 6 servos are powered from a 5A UBEC.
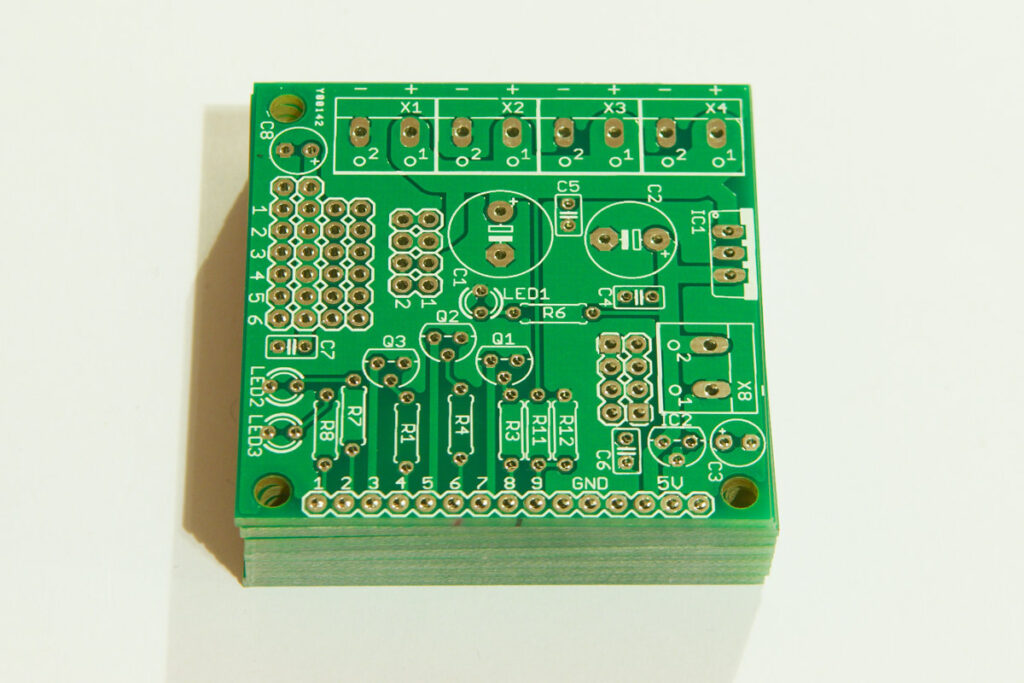
Service droid power pcb
After building the kit I took my remote control sketch for my old Rover 5 and modified it for the service droid. This lets me control the service droid with my self built remote control using a pair of 2.4GHz nRF24L01 modules. I made the following video:
After showing the video on Letsmakerobots the designer of the kit told me that the arms weren’t functioning correctly. I should have taken a better look at the manual. I have since corrected my mistakes 🙂
It’s not my intention to control the service droid with the nRF24L01 modules. I just used them to test all the functions of the robot. The next step is to add a Raspberry pi and camera. And try to control it over wifi. When I have that figured out I would like to try some autonomous things using OpenCV.
This is great indeed, I bought also a DAGO Service droid and I finished assembly it.
Now I need to connect all the servos, the ARDUINO mega and the DAGU 4 motors driver.
I reviewed your ARDUINO code posted on the other page.
I saw that you have one defined 4 servos (bottom, should, claw and roll) and one for one arm only, however in the video you are are able to move all the 8 servos (3 on the left arm, 3 one the right arm, plus the two servos on the pan/till). I wonder if you publish your newer version of the code.
Cheers from Madrid.
AC/.
I have only posted the code of my other Rover 5 (I have 2) which has only one arm/gripper. That’s the reason only 4 servos are defined… I won’t be posting Arduino code of my Service droid, it’s controlled by a Raspberry Pi now. But you can modify the code of my other Rover 5 quite easily to make it work with your Service droid.