
Hexapod chassis kit
I’ve started building my second hexapod, Bajdupod 996R. The 996R part of the name comes from the servos I’m using, I bought 30 Towardpro MG996R servos on Ebay many months ago. I only need 18 for this hexapod so I have some spare servos. Always a good idea, I destroyed several servos while building my previous hexapod.
I was originally planning on designing the hexapod myself. But then I found a Chinese made hexapod kit on Ebay, I couldn’t make the parts for the price of the kit so…
The kit only included the parts shown in the picture above. All the parts are made from low quality aluminum. I was a bit surprised when the kit arrived. The chassis was a bit smaller then I expected. But maybe that’s not so bad, the bigger/heavier the hexapod the more strain on the servos. My first hexapod was a bit problematic in that regard. This time I have chosen to use some more powerful servos, the MG996R servos have +10kg/cm of torque. I hope they are strong enough.

Towardpro mg996R servos
To power 18 MG996R servos you need a strong battery. So I bought a big 3S 3000mAh Lipo battery. The servos work at a maximum voltage of 6-7V so I needed a big voltage regulator, I chose to use 2 8A UBECs. These UBECs use switching regulators and they seem to work better at higher voltages. That’s why I chose a 3S Lipo instead of a 2S. I soldered some connectors and a fuse to a big switch (bought from Tayda Electronics) to hook up the UBECs and Lipo battery. This is the result:
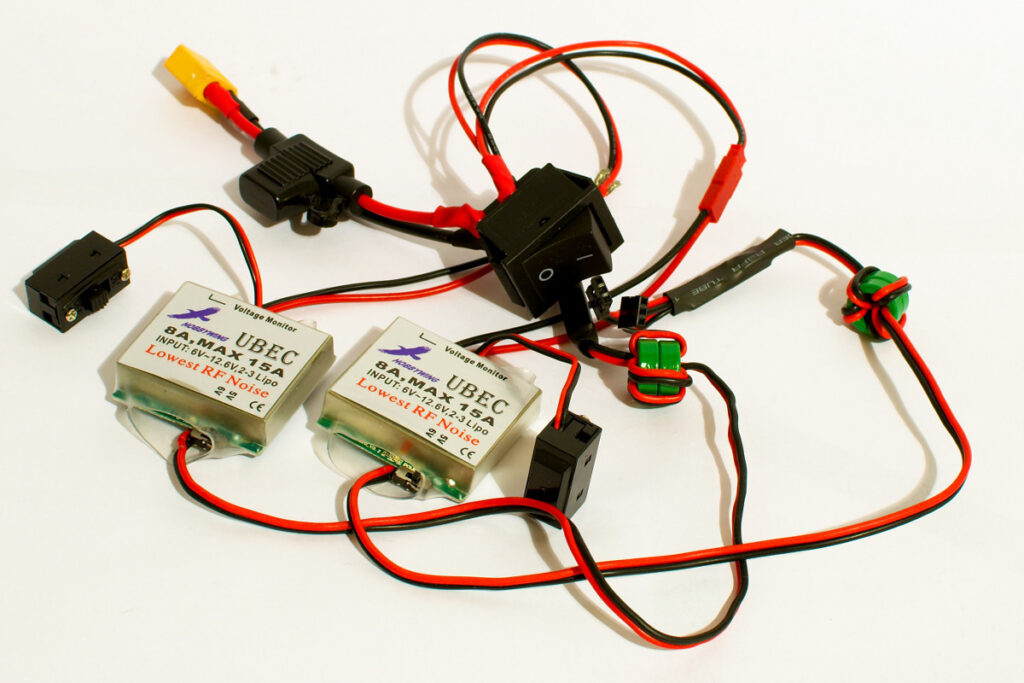
UBEC
To connect the power from the 2 UBECs to the servos I have designed a small PCB (50mm x 50mm). I had it made by Seeed Studio. I has enough pins to connect 24 servos. And it has some spare pins so I can use also power other things from the board. The power traces on the board are very wide (100mils) as 18 servos will draw quite a bit of current. I put 2 big electrolytic caps (2200µF) and 4 0,1µF ceramic capacitors on the board. UBECs can produce quite a bit of electric noise. I hope the capacitors will minimize that.
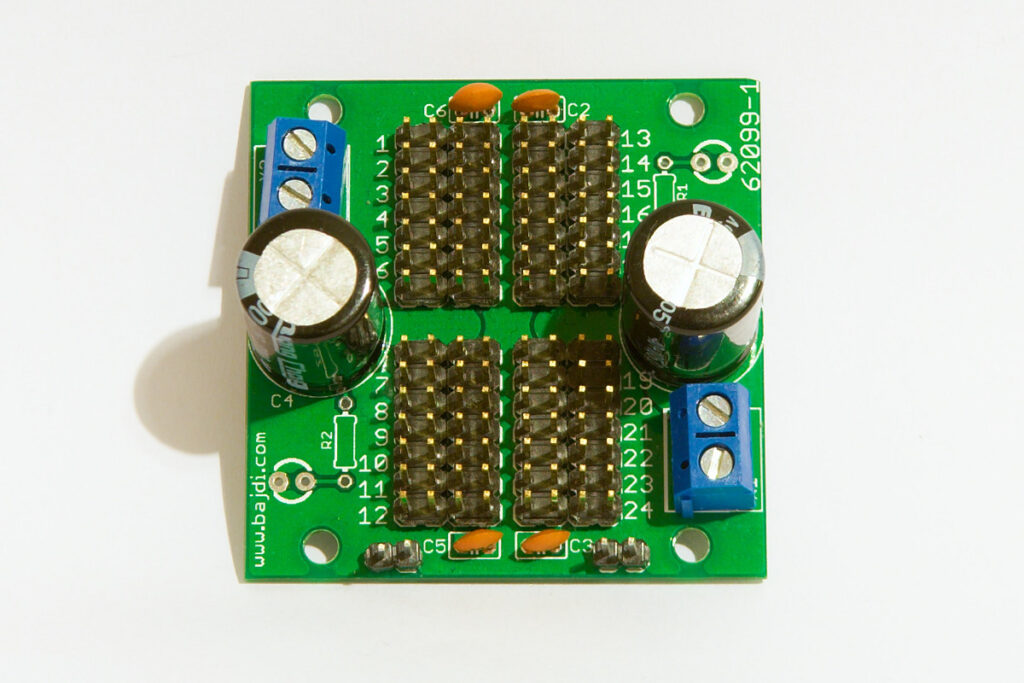
Servo board
After getting all the parts it was time to put them together. I needed a lot of M3 screws to connect all the brackets and servos. Luckily I have a big stock of M3 screws in various lengths. It took me several hours to put all the parts together.
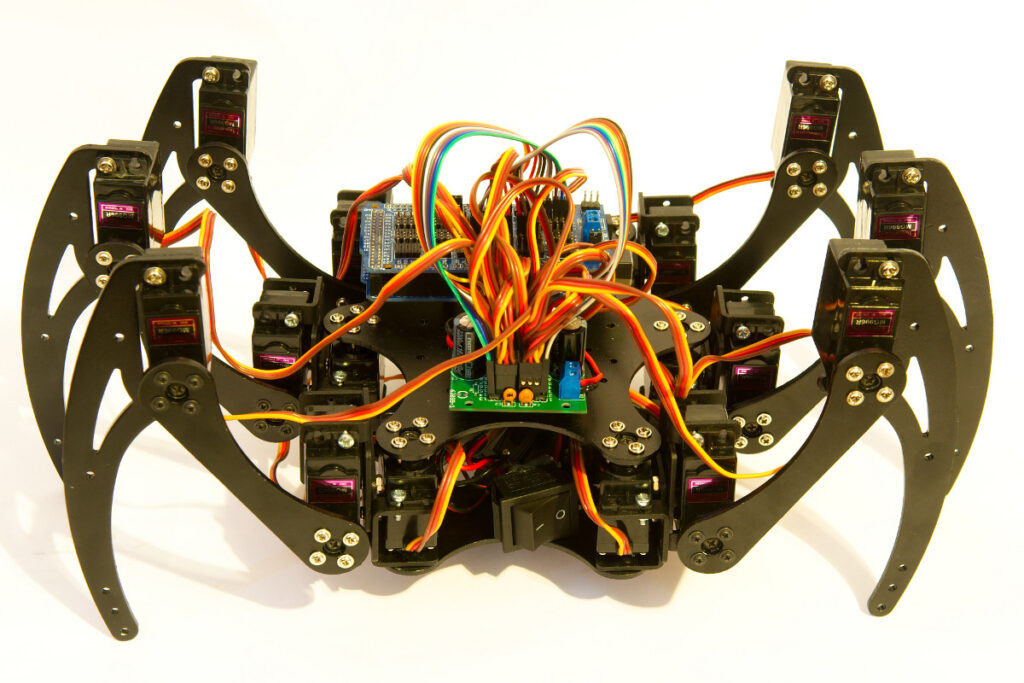
Hexapod bajdupod 996R
I have currently mounted an Arduino Mega 2560 with a sensor shield on the top chassis plate. I’ve connected all the servos to my servo board. Then I used a strip of flat cable with Dupont connectors to connect the servo board with the Arduino Mega 2560. The Mega has its own power supply, a small 2S lipo battery. You can control 48 servos with the Arduino servo library on an Arduino Mega. I may change the Arduino Mega for one of my self designed boards and use my Torobot 32 channel serial servo controller.
My goal is to program the robot using inverse kinematics. I found a good explanation on this website. It’s the best information I have found so far. Still it will be quite a challenge to program the hexapod and make a smooth walking gait for it. I hope to remote control it through a couple of wireless nRF24L01 modules.
Hi, your build is looking almost exactly the same way i would like to go. Would you be able to post a link to the body kit that you got? also, how are you finding the MG996R servos? some reviews have questioned their precision, have you done any testing with them yet?
Thanks
I found the kit on Ebay. Try searching for it in a week, because of Chinese new year a lot of sellers have taken their shops offline.
The hexapod hasn’t walked yet, I’m still working on the inverse kinematics code. The MG996R servos seem to be strong enough. But I’m unsure if the horns will be able to handle the weight/forces. I might replace them with metal horns. I have also read that these aren’t the most precise servos. But I don’t think the precision is an issue with a hexapod.
Hi, thanks for responding. i will look on Ebay. are you finding the plastic horns deflecting under load, or why do you think they maybe a problem? i have the same fears as well but thought that maybe with load distributed they would be ok. i have been looking for a economical supplier for the MG959 that have the aluminum body and horn right from tower pro to allay these fears..
Have you looked at the phoenix code from lynxmotion?
I’ve ordered metal horns a couple of days ago on Aliexpress. I don’t think the plastic ones are sturdy enough. I payed less then 5€ a piece for MG996R servos on Ebay.
I’ve looked at the Phoenix code but it’s not usable. It looks very complex and uses progmem. They have precalculated most of the math and put it in an array. I don’t think you can easily convert it to a hexapod with other dimensions.
I have finished the basic IK code, see my last post: http://www.bajdi.com/bajdupod-996r-trouble/
Please do not think that code from an other hexapod will work on yours. While the math is the same, you still have to convert the IK angles to servo angles.
Hi, ive got the same kit with, surprisingly, same servos and the boards. Atm having power issues, waiting for a new battery. Could you please explain a little more on how did you connected the servo board to the shield. Because im just connecting then to the shied itself and not sure if it can cause problems :/
Which “servo board”? If you mean the small self designed PCB above, it’s only purpose is to power the servos from different power supplies. I initially used 2 UBECs to power the servos, but they could not supply enough current. Read my other posts: http://www.bajdi.com/category/bajdupod-996r/
did you paralel the output of ubec? or one ubec for half of total your servos?
In the end I used 3 UBEC’s, each UBEC powers 6 servos. In the beginning I used 2 8A UBEC’s but they didn’t last long…