Lipo battery to screw terminal with switch
All the robots I have built so far have been powered by Lipo batteries. I chose Lipo batteries because they are very powerful (they can discharge very fast) and pretty compact for their capacity. That’s why lipo batteries are used in remote controlled scale helicopters, airplanes, cars, …
Lipos don’t cost that much any more, you can find small 2S batteries for less then 10$ on Ebay. They are strong enough to power a small robot. I have bought a whole bunch of 2S and 3S batteries last year.
Because of their low internal resistance lipos can provide a very high discharge current. So it’s best not to short cut them. You run the risk of damaging the battery and they could explode. Search youtube for “lipo explosion” to see some sensational videos 😀
So its best to treat them carefully. Only charge them with a charger suited for lipo batteries. Don’t discharge them to low, minimal cell voltage should be kept above 3V. I usually charge them a bit sooner just to be safe. On all my robots I have used a voltage divider to monitor the battery voltage.
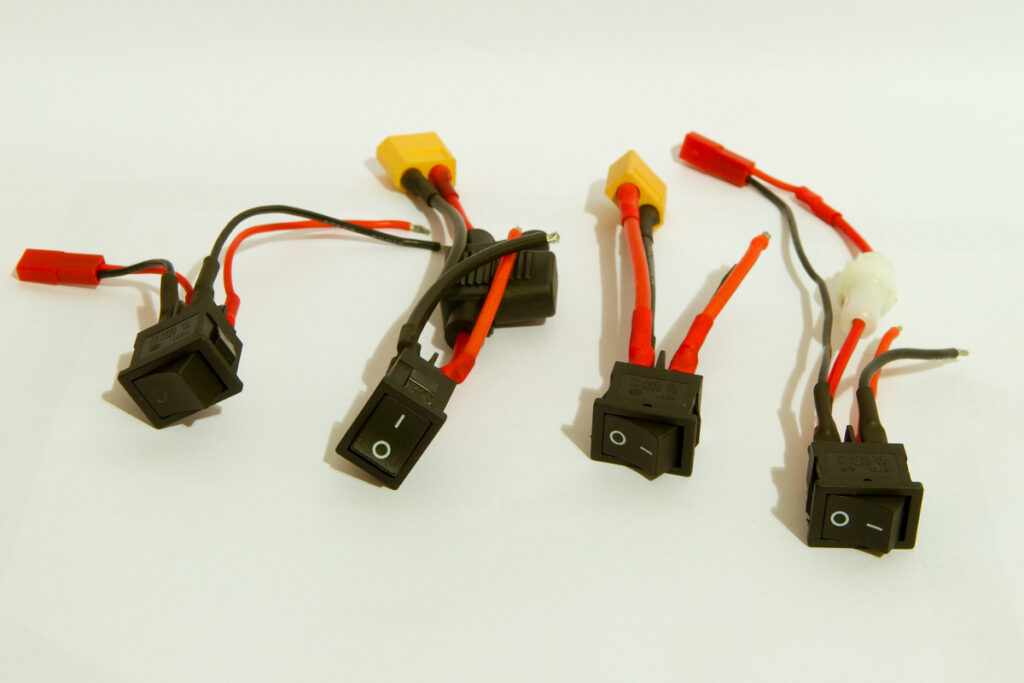
The PCB’s I’ve designed until now have screw terminals to connect a power supply. All my Lipo batteries have male connectors, so I first bought some female connectors and soldered some wires to them. Disconnecting the XT60 or JST connectors all the time to turn of the robot is not very handy. So I added a switch and a fuse to connect the lipos to my robots. My small lipo batteries have JST connectors, the bigger ones have XT60 connectors. I soldered female connectors to short pieces of wire. I added a switch which I bought from Tayda Electronics. To protect the battery I also added a fuse in the positive wire. I bought some small in line fuses at Tayda Electronics and some mini blade fuses on Ebay. I use a 10A fuse on my Rover 5, my small hexapod uses a 5A fuse.