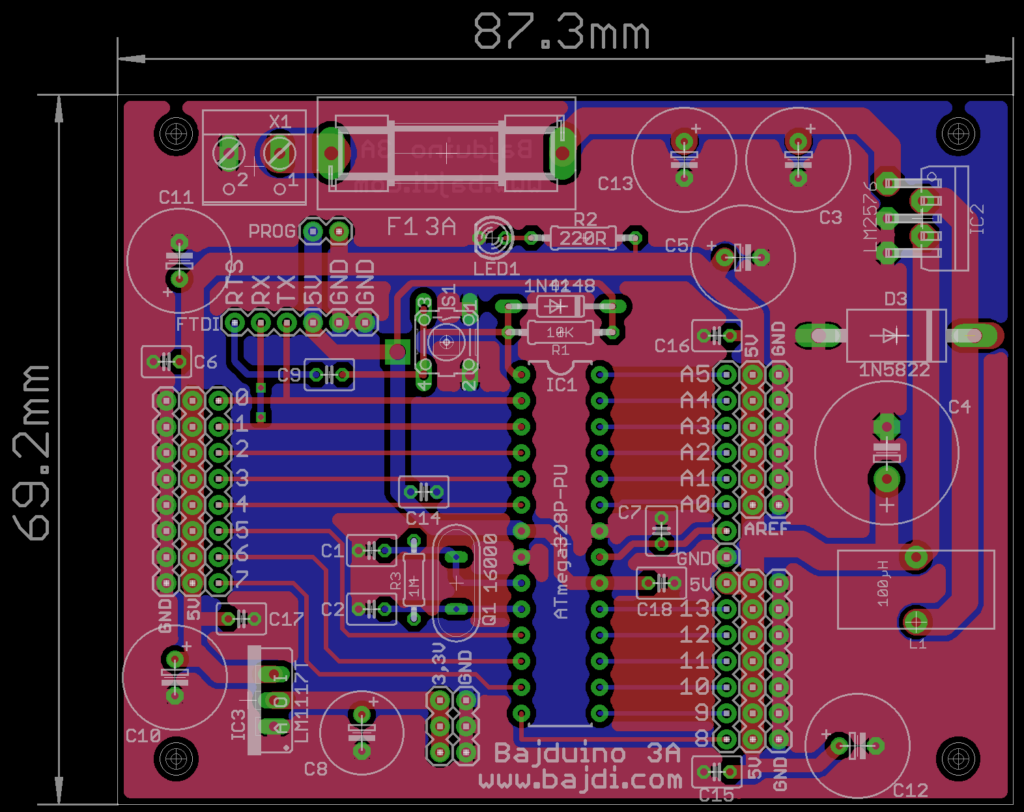
Bajduino 3A: ATmega 328P-PU powered by LM2576 5V 3A regulator. 3 rows of male headers for easy connection of servos and sensors.
After successfully designing and soldering my first PCB it’s time to take things a little further and design my own Arduino, the Bajduino :p. I’ve bought all the necessary electronic components to make a lot of boards. So now I only need to finish my PCB designs and have them made by Seeedstudio or Iteadstudio in China. These are the cheapest PCB services I know of, they seem to be very popular and I have read good reviews of both of them. After I found out that the Chinese PCB manufacturers charge the same price for a single and dual layer PCB I changed all my designs to dual layer PCB’s. I’ve also added ground planes to the top and bottom of the boards.
The next PCB I’ll have made is my Bajduino 3A. It is based on the ATmega 328P-PU micro controller and the LM2576 3A 5V switch mode regulator. I hope to use this board for a small hexapod that I will built in the future. The 3A 5V regulator should be powerful enough to power the servos as I have proven in the video in my previous post. I’ve spent a considerable amount of time on this board and learned a lot of things. I’ve spent hours reading the datasheets of the various components, especially the datasheets of the ATmega 328 and the LM2576 regulator. It’s also a good idea to study the design of the official Arduino boards. There were a couple of things that I had overlooked in my first design. Things like the 1 mega ohm resistor across the crystal and the reverse biased diode across the 10K pullup resistor on the reset line. There are a massive amount of capacitors on the board. But since the board will be used to power 12 servos the caps will help filter the noise and prevent voltage surges. The cheap micro 9G servos that I’ve already bought are noisy things. Tayda electronics has already supplied me with a couple of hundred capacitors.
The 5V trace is very wide so that it can handle the current drawn by the servos. There is an FTDI header on the board, as I’ll use an FTDI to TTL cable that I have bought on Ebay to upload sketches and for using the Arduino serial monitor. The prog jumper on the top left of the board will be removed when using the FTDI cable, else the board and all the things connected to it would be powered by the USB cable. Not something you want to try when there are 12 servos connected to the board. The 3,3V regulator in the bottom left corner will be used to power a nRF24L01 module so I can remote control my hexapod. For safety reasons I have added a fuse on the input as I will use a Lipo battery to power the board. You just need to search on Youtube for exploding Lipos to know why it’s a very good idea. These batteries don’t like short circuits.
I’ve used Eagle 6.2.0 for all my designs. It took me some time to figure out all the features and I still have a lot to learn. To check my designs before sending them out I’ve installed Gerbv, an open source Gerber viewer. It’s best to thoroughly check your design in a Gerber viewer before sending out the Gerber files to the PCB manufacturer.
I’m already working on my next PCB, a simple breakout board for the ATmega 1284P-PU. This is a 40 pin micro controller with 128kb of memory. The biggest micro controller Atmel makes in DIP format.